EfficientNet 논문 설명(EfficientNet - Rethinking Model Scaling for Convolutional Neural Networks)
01 Mar 2022 | MobileNet Google이 글에서는 Google Inc.에서 발표한 MobileNet V3 논문을 간략하게 정리한다.
EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks
논문 링크: EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks
Github: https://github.com/tensorflow/tpu/tree/master/models/official/efficientnet
- 2019년 5월(Arxiv), ICML 2019
- Mingxing Tan, Quoc V. Le
최근에 모델의 크기를 키움으로써 성능을 높이는 방향의 연구가 많이 이루어졌다. 모델을 크게 만드는 것은 3가지 방법이 있는데,
- network의 depth를 깊게 만드는 것
- channel width(filter 개수)를 늘리는 것(width가 넓을수록 미세한 정보가 많이 담아짐)
- input image의 해상도를 올리는 것
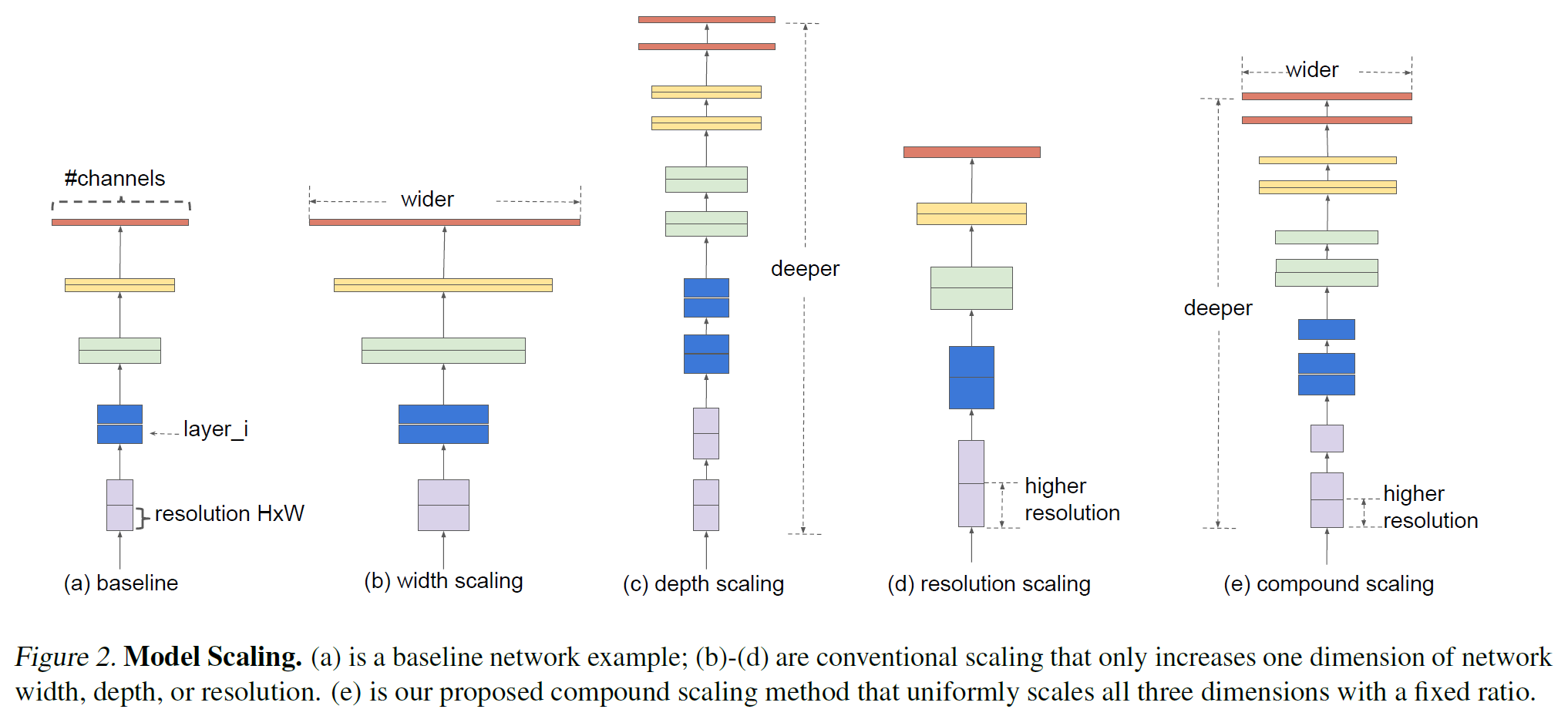
EfficientNet은 이 3가지의 최적의 조합을 AutoML을 통해 찾은 논문이다. 조합을 효율적으로 만들 수 있도록 하는 compound scaling 방법을 제안하며 이를 통해 더 작은 크기의 모델로도 SOTA를 달성한 논문이다.
Abstract
- 한정된 자원으로 최대의 효율을 내기 위한 방법으로 model scaling(depth, width, resolution)을 시스템적으로 분석하여 더 나은 성능을 얻고자 한다.
- 새로운 scaling 방법으로 compount coefficient를 제안한다.
- 이를 바탕으로 찾은 효율적인, 기본이 되는 모델 EfficientNet을 소개한다.
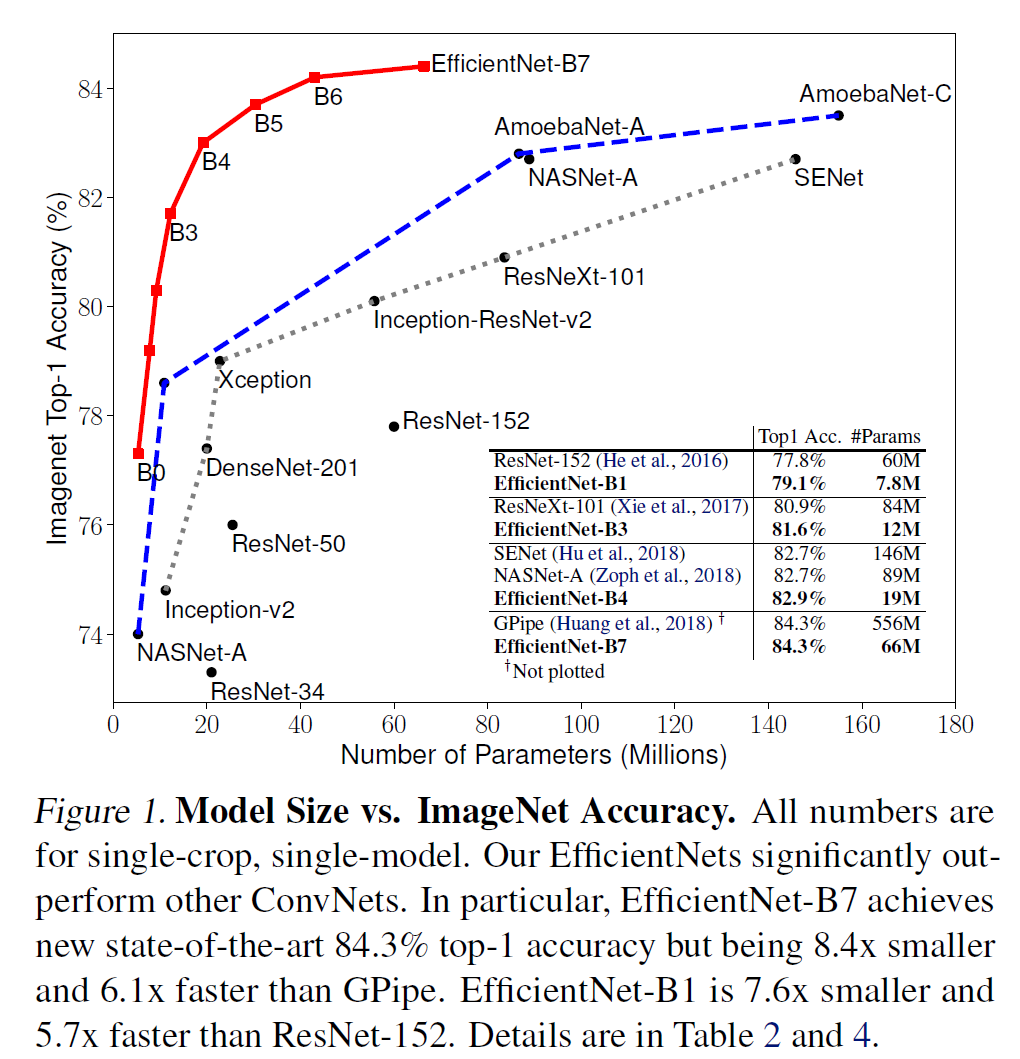
- ImageNet에서 기존 ConvNet보다 8.4배 작으면서 6.1배 빠르고 더 높은 정확도를 갖는다.
1. Introduction
- ConvNet의 크기를 키우는 것은 널리 쓰이는 방법이다.
- 그러나 제대로 된 이해를 바탕으로 이루어지지는 않았던 것 같다.
- 그래서 scaling하는 방법을 다시 한 번 생각해보고 연구하는 논문을 제안한다.
- 그 방법이 compound scaling method이다.
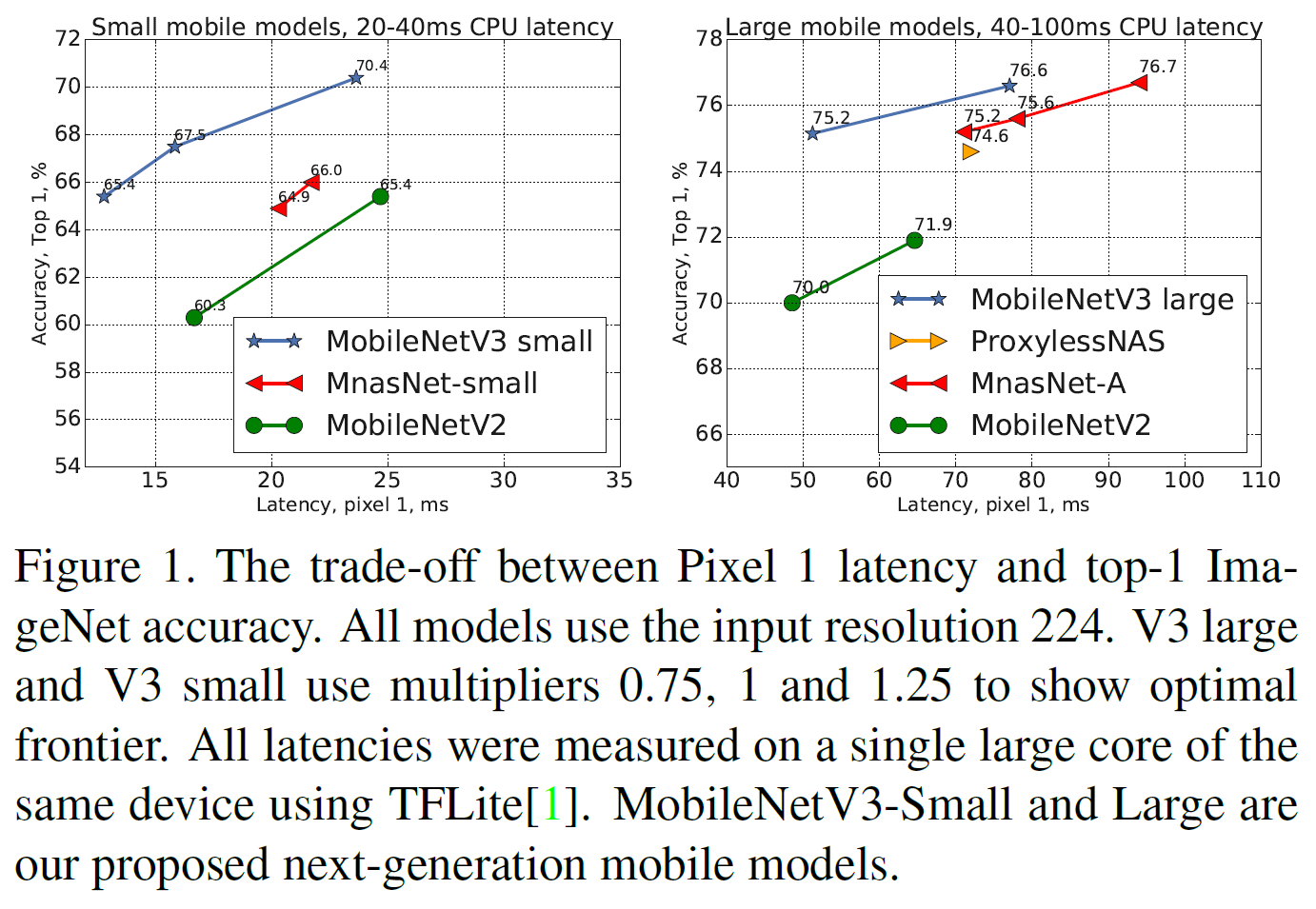
- 이 방법을 MobileNets와 ResNet에서 검증해보고자 한다.
- 그림 1이 결과를 보여주고 있다.
2. Related Work
ConvNet Accuracy
AlexNet 이후 ImageNet competition에서 더 깊어지고 커지면서 정확도가 높아지는 모델들이 여럿 발표되었다. 최근 발표되는 모델들은 ImageNet뿐만 아니라 다른 데이터셋에서도 잘 작동한다. 그러나 정확도는 높아졌지만, 사용하는 자원 역시 크게 늘어났다.
ConvNet Efficiency
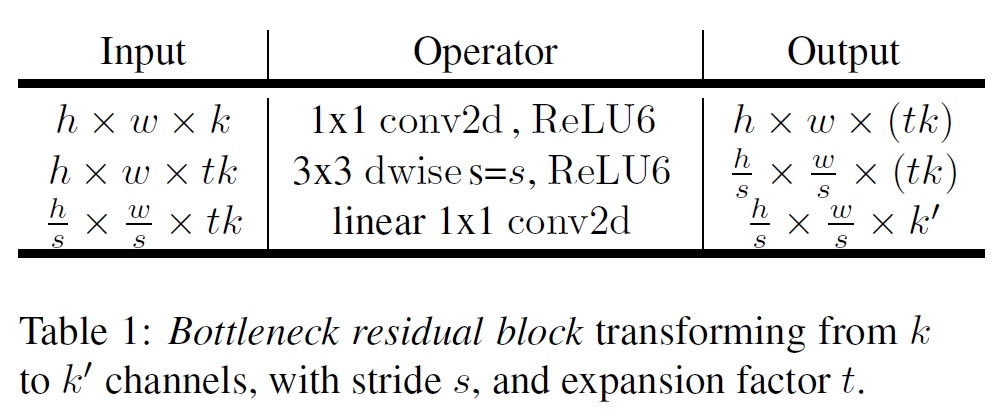
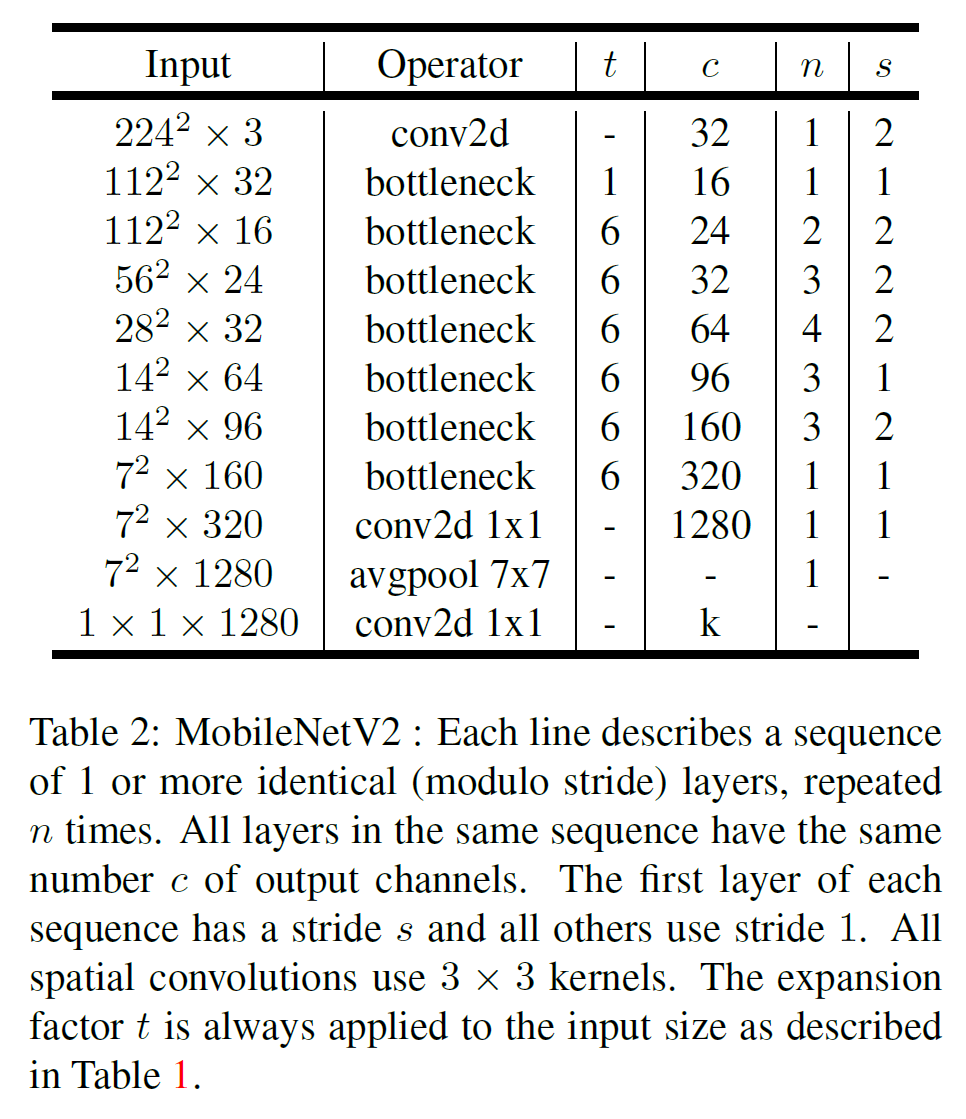
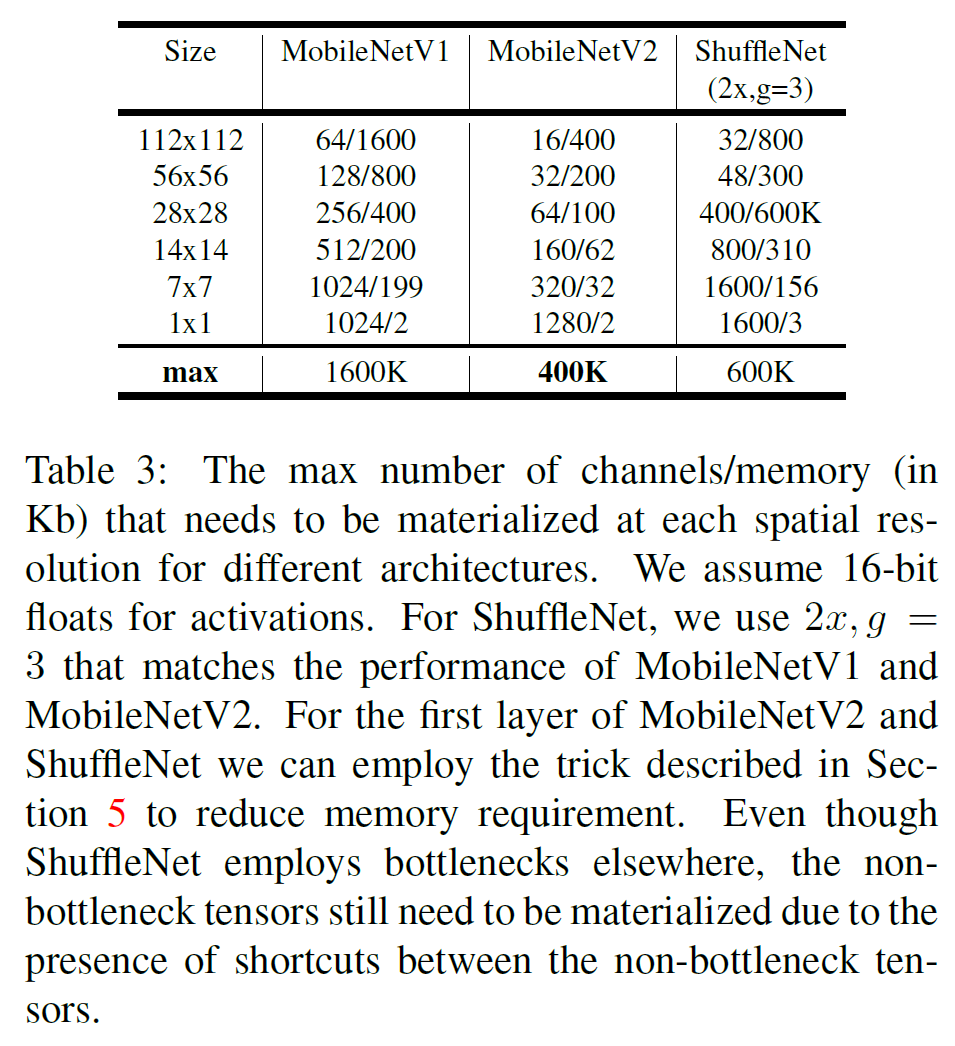
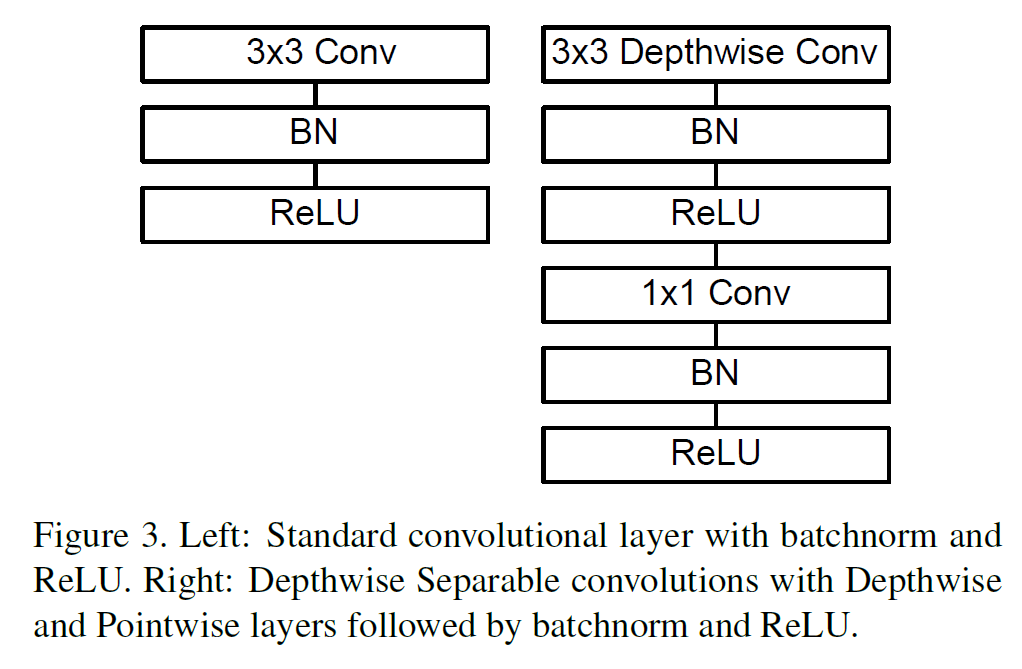
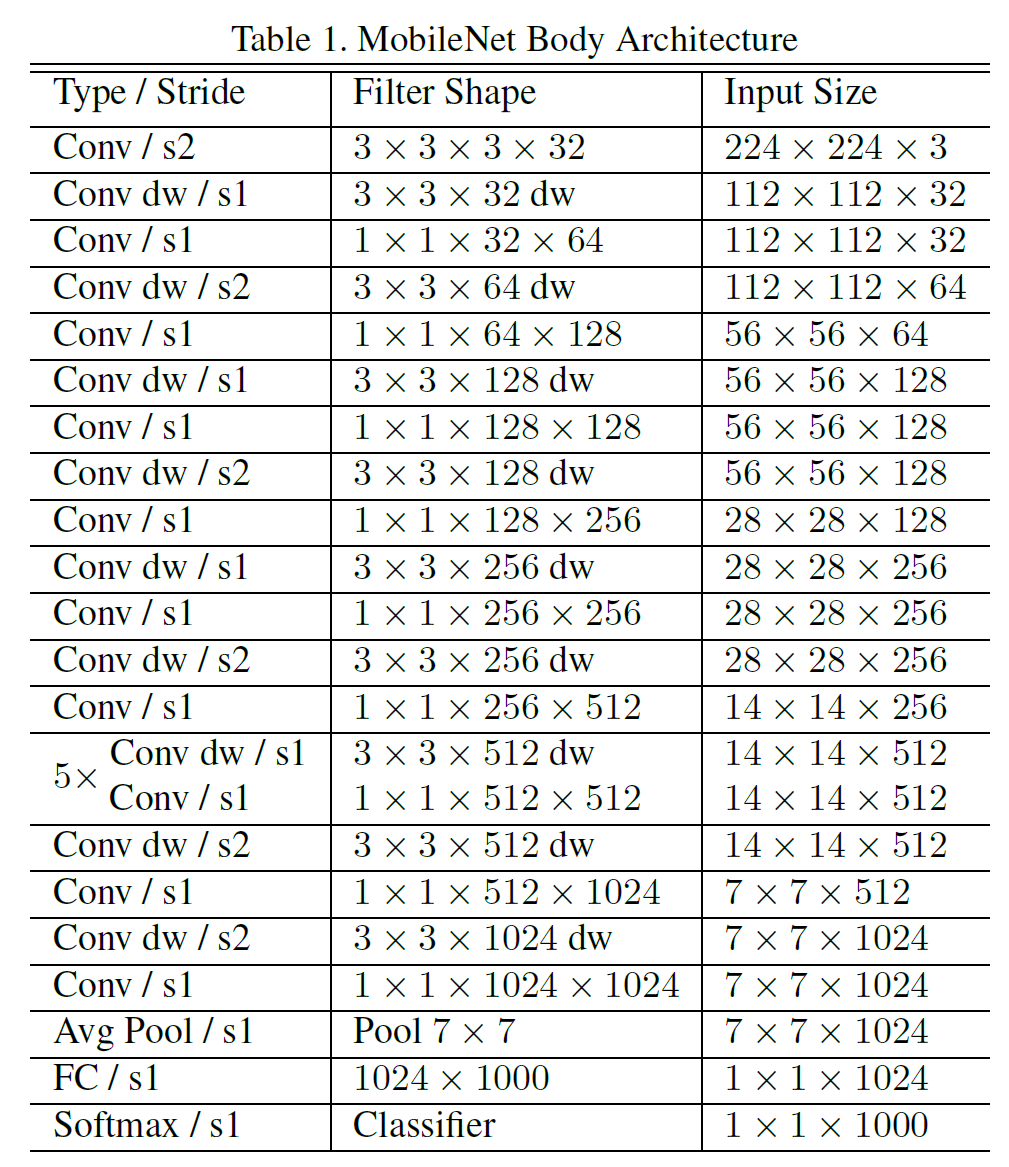
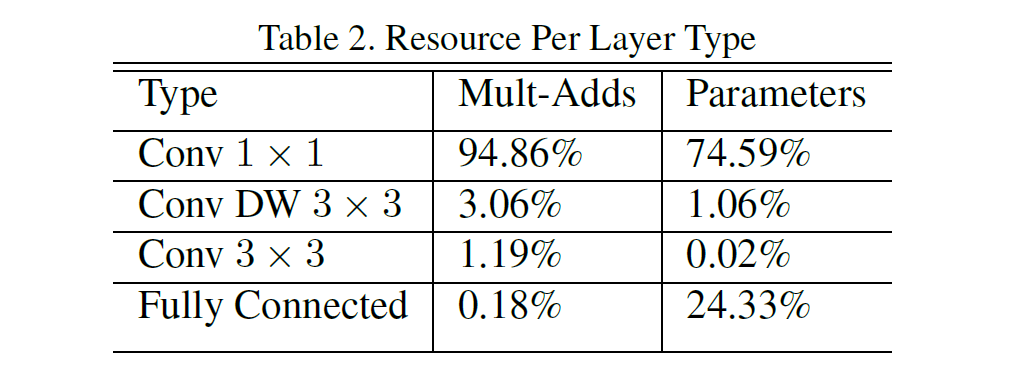
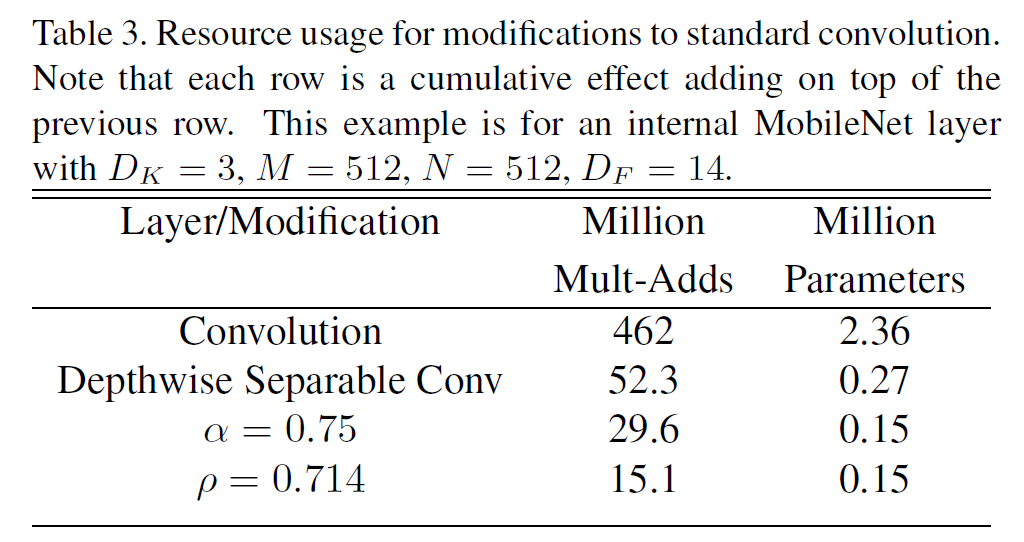
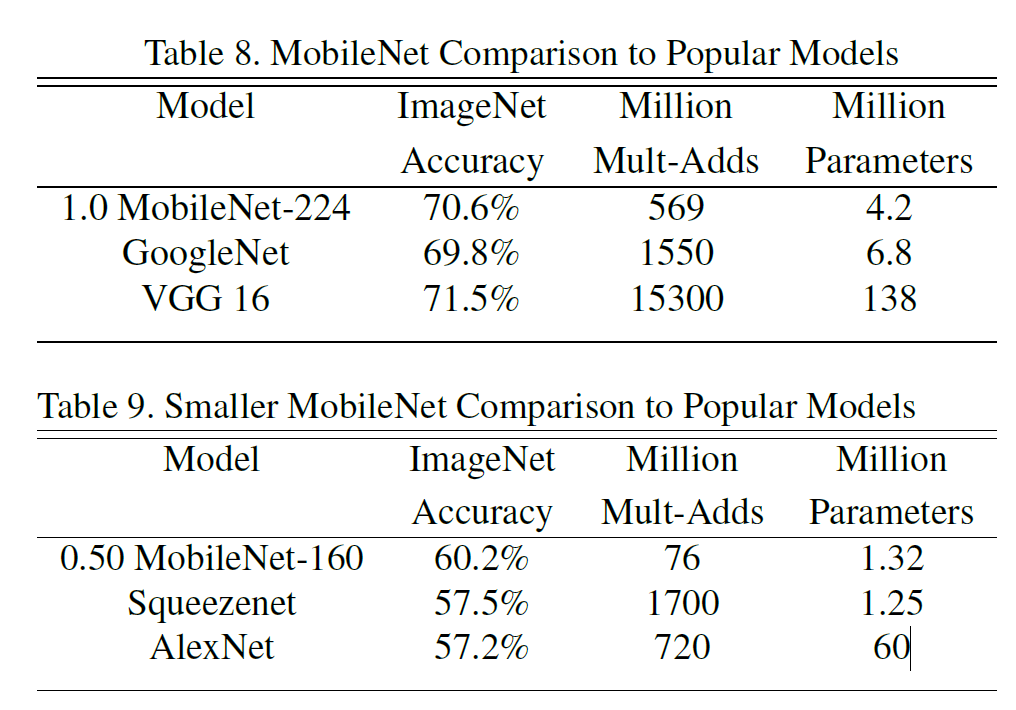
깊은 ConvNets는 좀좀 over-parameterized된다. 효율을 높이기 위해 모델 압축하는 여러 기법이 제안되었다: SqueezeNets, MobileNets, ShuffleNets 등.
Model Scaling
- ResNet(ResNet-18, ResNet-50, ResNet-200)은 깊이를 달리 하였다.
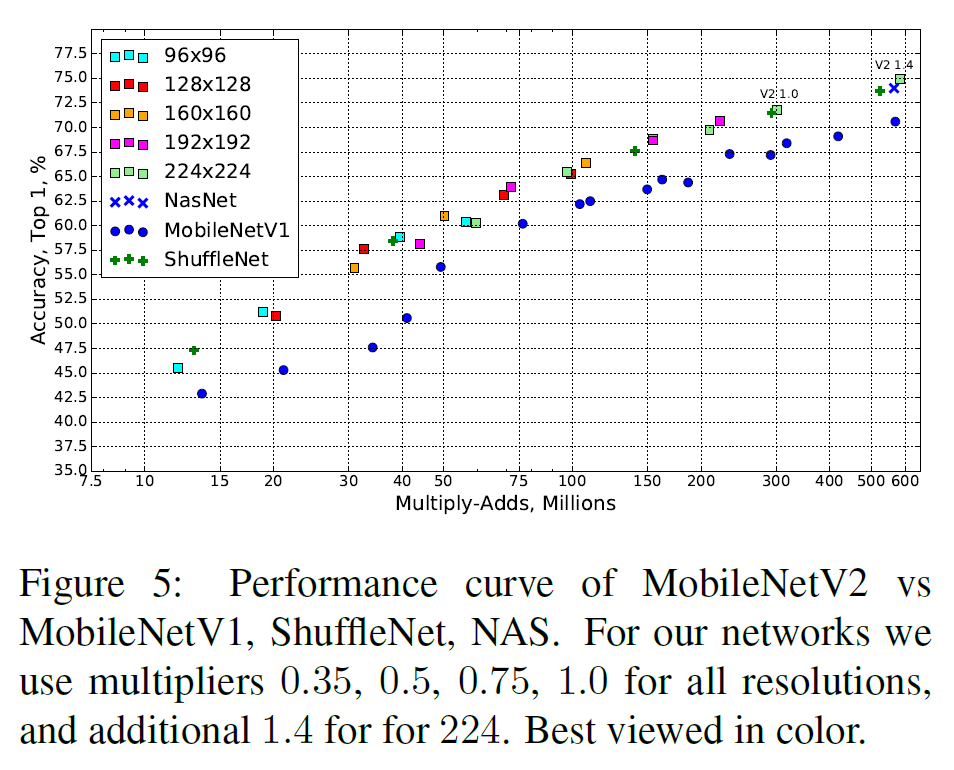
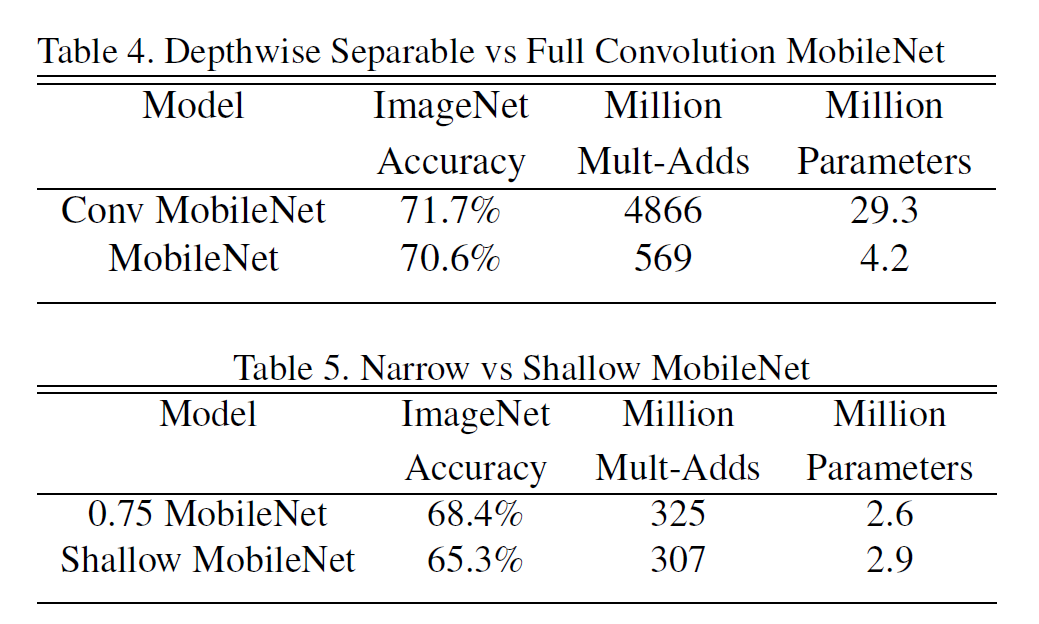
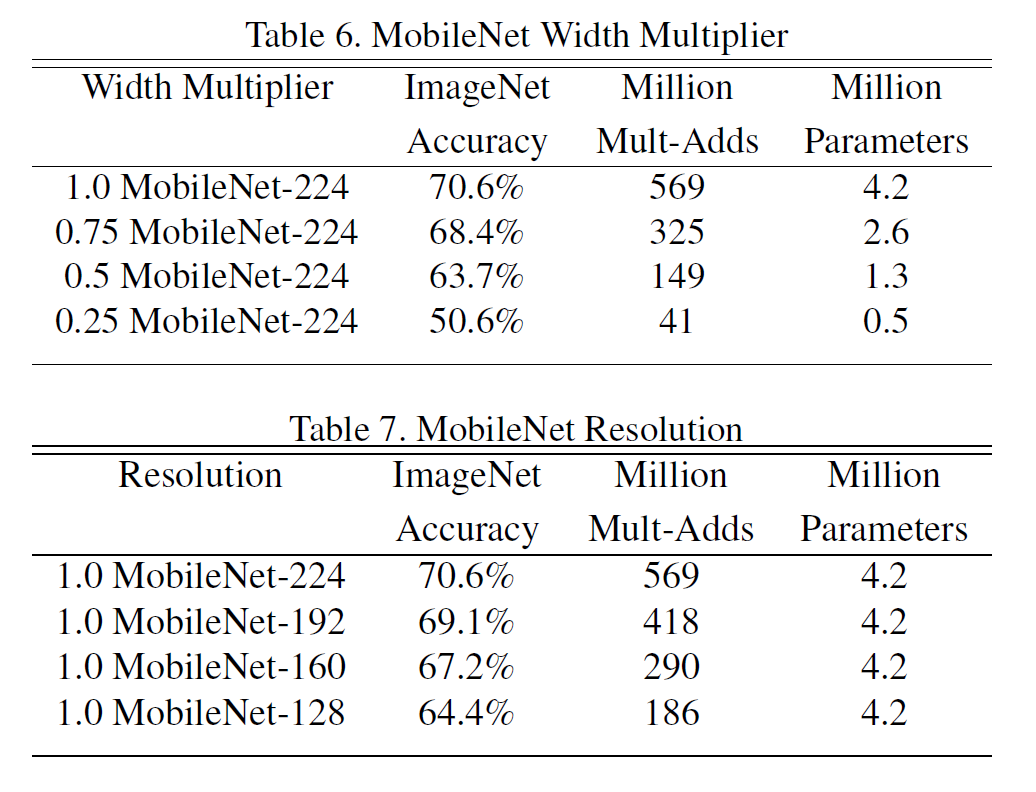
- MobileNets는 network width를 달리 하였다.
- 또한 이미지 해상도가 높아지면 (찾아낼 정보가 많아서) 정확도를 높아진다. (물론 계산량도 많이 늘어난다.)
많은 연구가 진행되었으나 어떻게 효율적인 조합을 찾는지는 아직까지 정립되지 않았다.
3. Compound Model Scaling
3.1. Problem Formulation
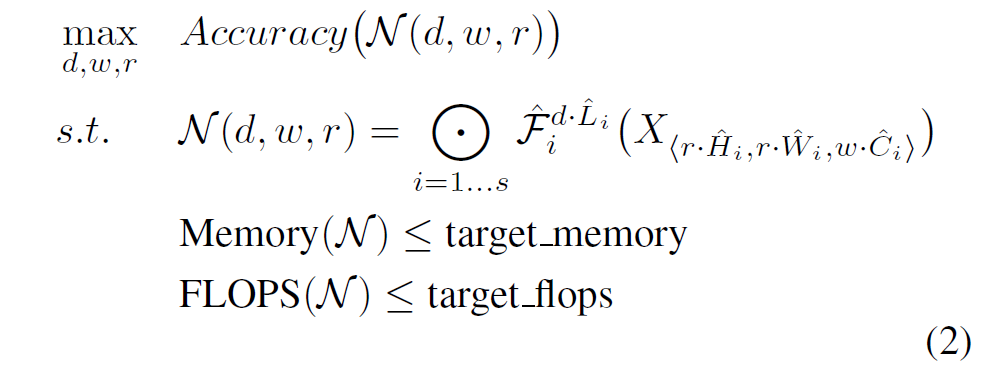
뭔가 괜히 복잡하게 써 놨는데 그냥 ConvNet을 수식화해 정리해놓은 부분이다. $H, W, C$를 입력 tensor의 크기, $F$를 Conv layer라 하면 ConvNet은

로 표현 가능하다.
모델이 사용하는 자원이 제한된 상태에서 모델의 정확도를 최대화하는 문제를 풀고자 하는 것이므로, 이 문제는 다음과 같이 정리할 수 있다.
3.2. Scaling Dimensions
- Depth: 네트워크의 깊이가 증가할수록 모델의 capacity가 커지고 더 복잡한 feature를 잡아낼 수 있지만, vanishing gradient의 문제로 학습시키기가 더 어려워진다. 이를 해결하기 위해 Batch Norm, Residual Connection 등의 여러 기법들이 등장하였다.
- Width: 각 레이어의 width를 키우면 정확도가 높아지지만 계산량이 제곱에 비례하여 증가한다.
- Resolution: 입력 이미지의 해상도를 키우면 더 세부적인 feature를 학습할 수 있어 정확도가 높아지지만 마찬가지로 계산량이 제곱에 비례해 증가한다.
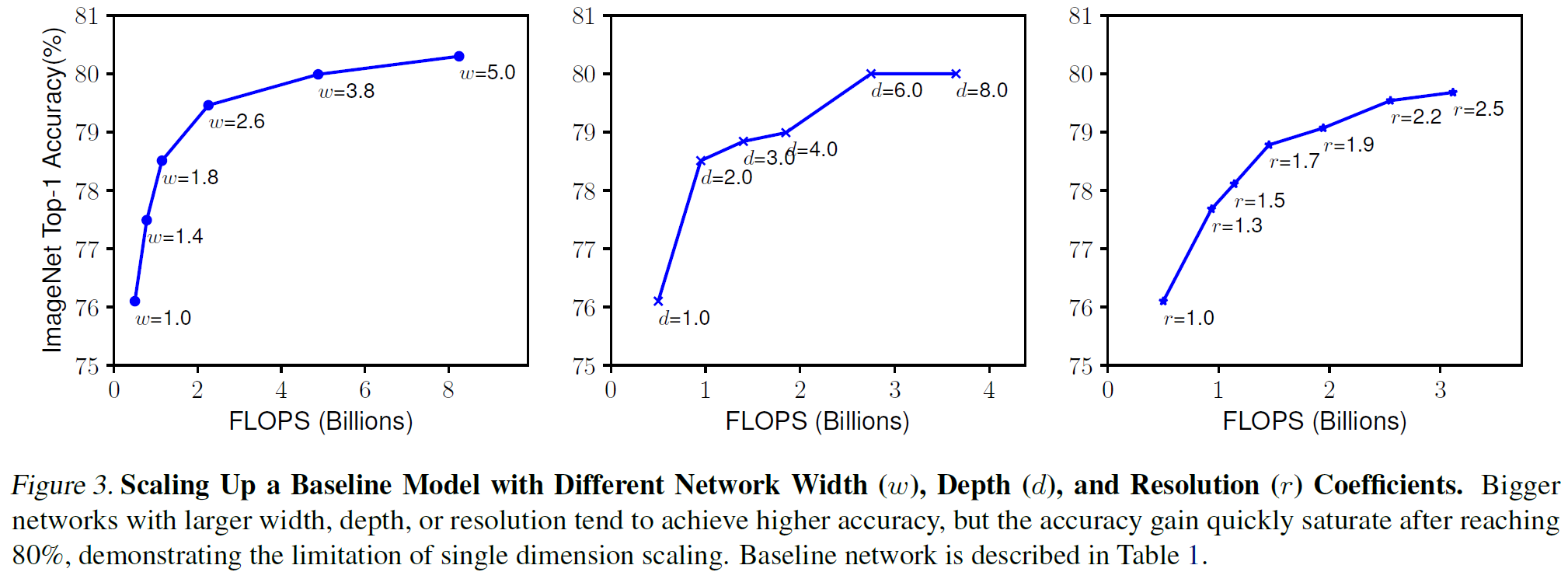
공통적으로, 어느 정도 이상 증가하면 모델의 크기가 커짐에 따라 얻는 정확도 증가량이 매우 적어진다.
3.3. Compound Scaling
직관적으로, 더 높은 해상도의 이미지에 대해서는,
- 네트워크를 깊게 만들어서 더 넓은 영역에 걸쳐 있는 feature(by larger receptive fields)를 더 잘 잡아낼 수 있도록 하는 것이 유리하다.
- 또, 더 큰 이미지일수록 세부적인 내용도 많이 담고 있어서, 이를 잘 잡아내기 위해서는 layer의 width를 증가시킬 필요가 있다.
즉, 이 depth, width, resolution이라는 세 가지 변수는 밀접하게 연관되어 있으며, 이를 같이 움직이는 것이 도움이 될 것이라고 생각할 수 있다.
계산량은 깊이에 비례하고, 나머지 두 변수에 대해서 그 제곱에 비례하므로 다음과 같은 비율로 변수들이 움직이게 정할 수 있다.
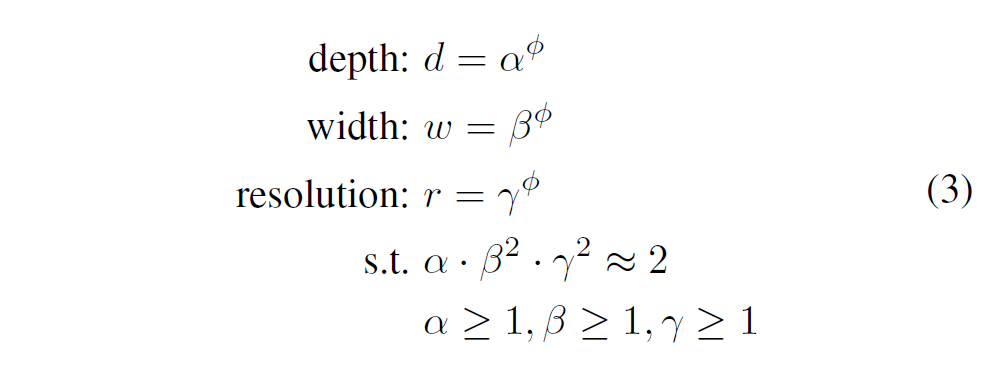
이 논문에서는 $\alpha \cdot \beta^2 \cdot \gamma^2 \approx 2$로 맞춰서 전체 계산량은 $2^\phi$에 비례하게 잡았다.
4. EfficientNet Architecture
MnasNet에 기반한 baseline network를 사용한다. 구체적인 모양은 다음과 같다.
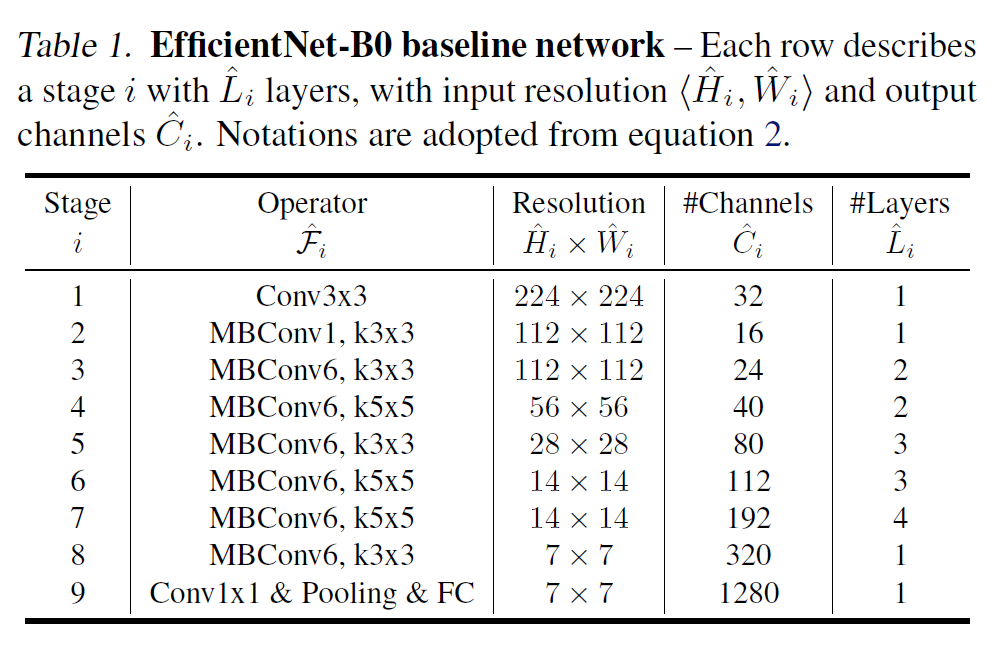
이 baseline network에 기반해서 시작한다.
- STEP 1: $\phi=1$로 고정하고, $\alpha, \beta, \gamma$에 대해서 작게 grid search를 수행한다. 찾은 값은 $\alpha=1.2, \beta=1.1, \gamma=1.15$로 $\alpha \cdot \beta^2 \cdot \gamma^2 \approx 2$이다.
- STEP 2: 이제 $\alpha, \beta, \gamma$를 고정하고 $\phi$를 변화시키면서 전체적인 크기를 키운다.
$\alpha, \beta, \gamma$를 직접 갖고 큰 모델에 실험해서 더 좋은 결과를 얻을 수도 있지만 큰 모델에 대해서는 그 실험에 들어가는 자원이 너무 많다. 그래서 작은 baseline network에 대해서 먼저 좋은 $\alpha, \beta, \gamma$를 찾고(STEP 1) 그 다음에 전체적인 크기를 키운다(STEP 2).
5. Experiments
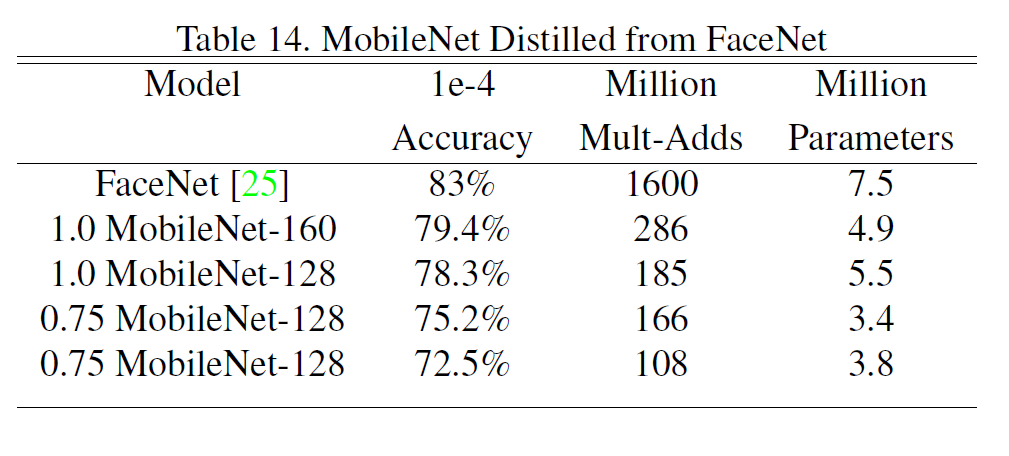
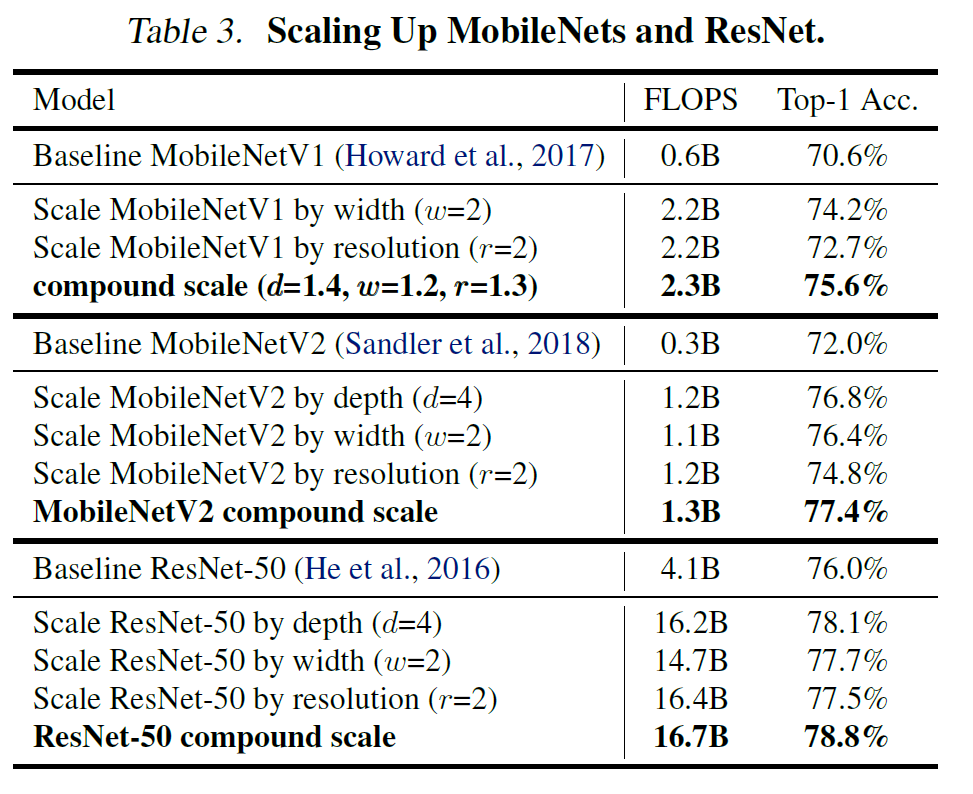
5.1. Scaling Up MobileNets and ResNets
결과부터 보자.
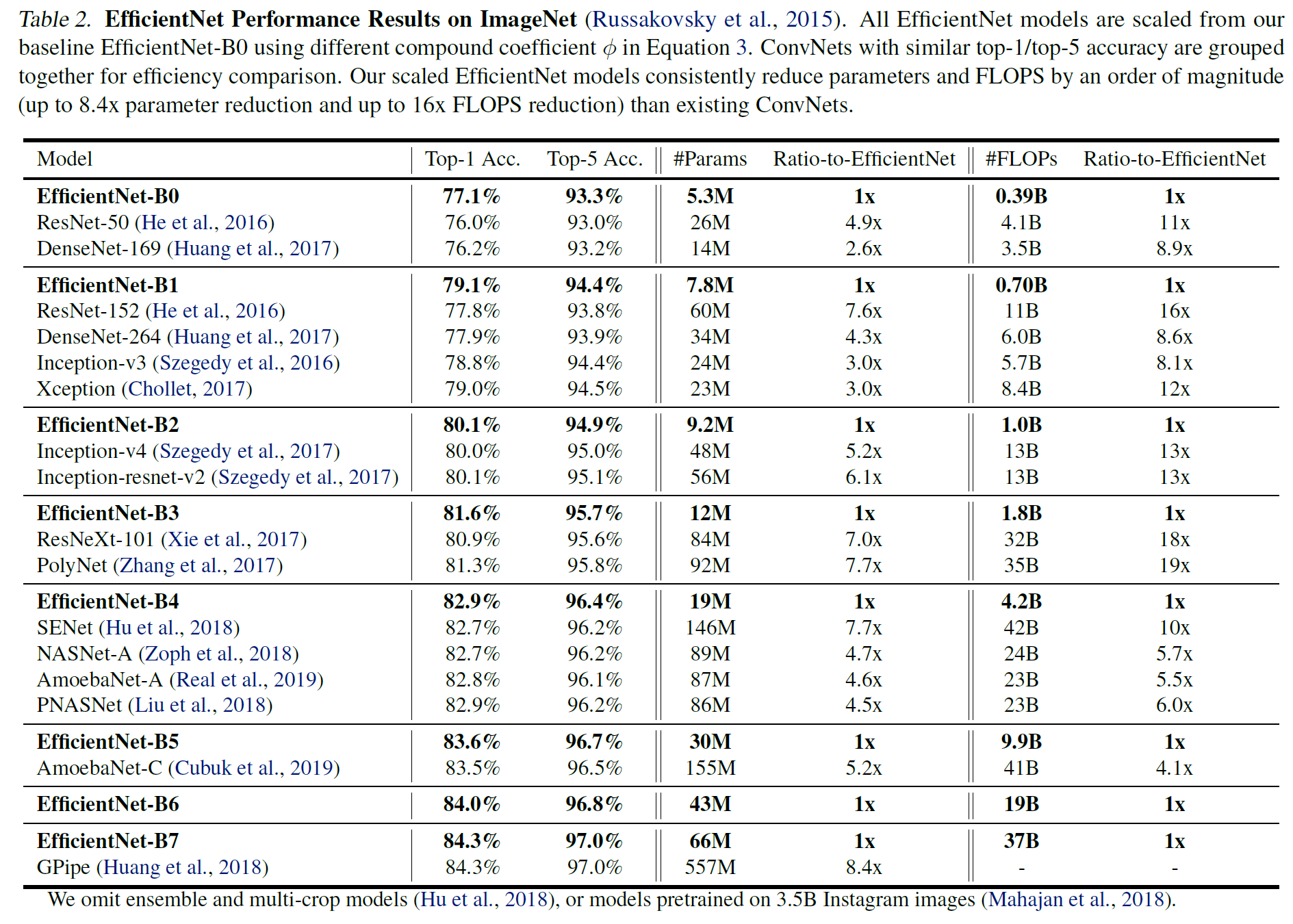
Efficient하다.
depth, width, resolution을 어떻게 늘리는지에 대한 비교도 진행해 보았다. 섹션 3의 직관적인 설명과 같은 결과를 보이고 있다.
5.2. ImageNet Results for EfficientNet
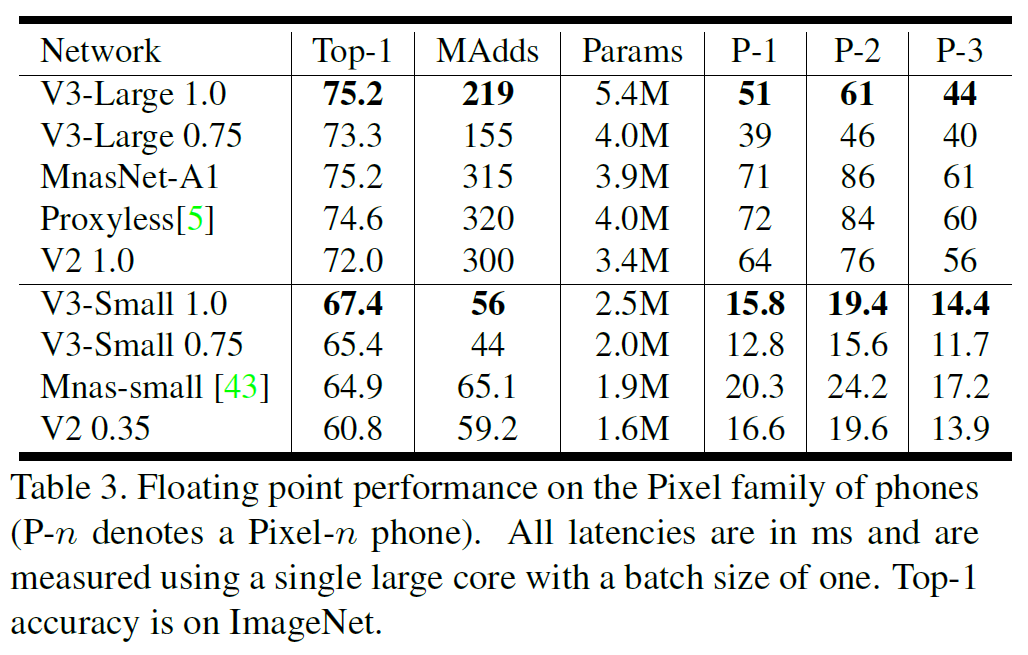
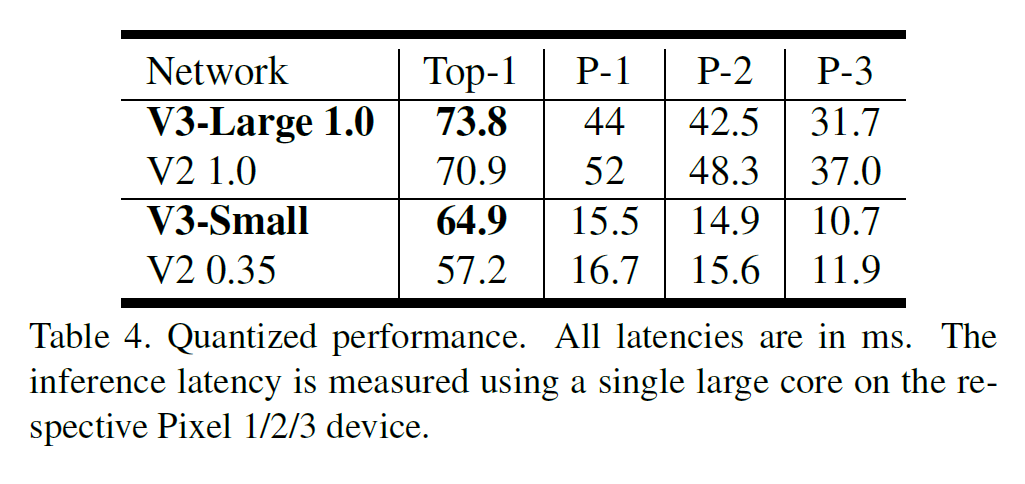
추론 latency에 대한 결과를 기록해 놓았다.
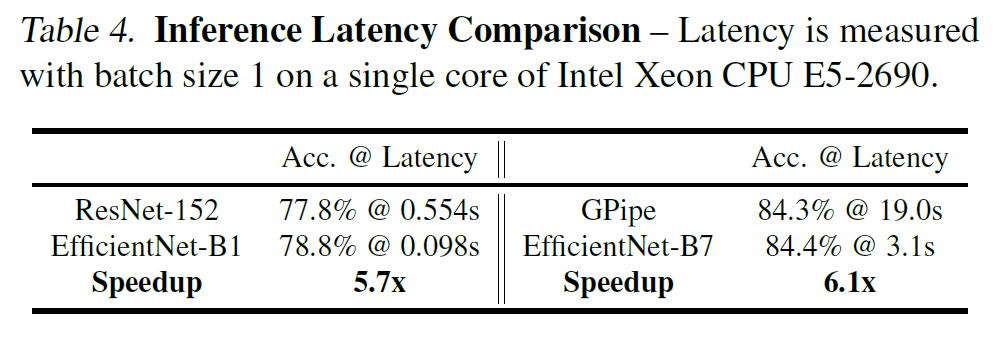
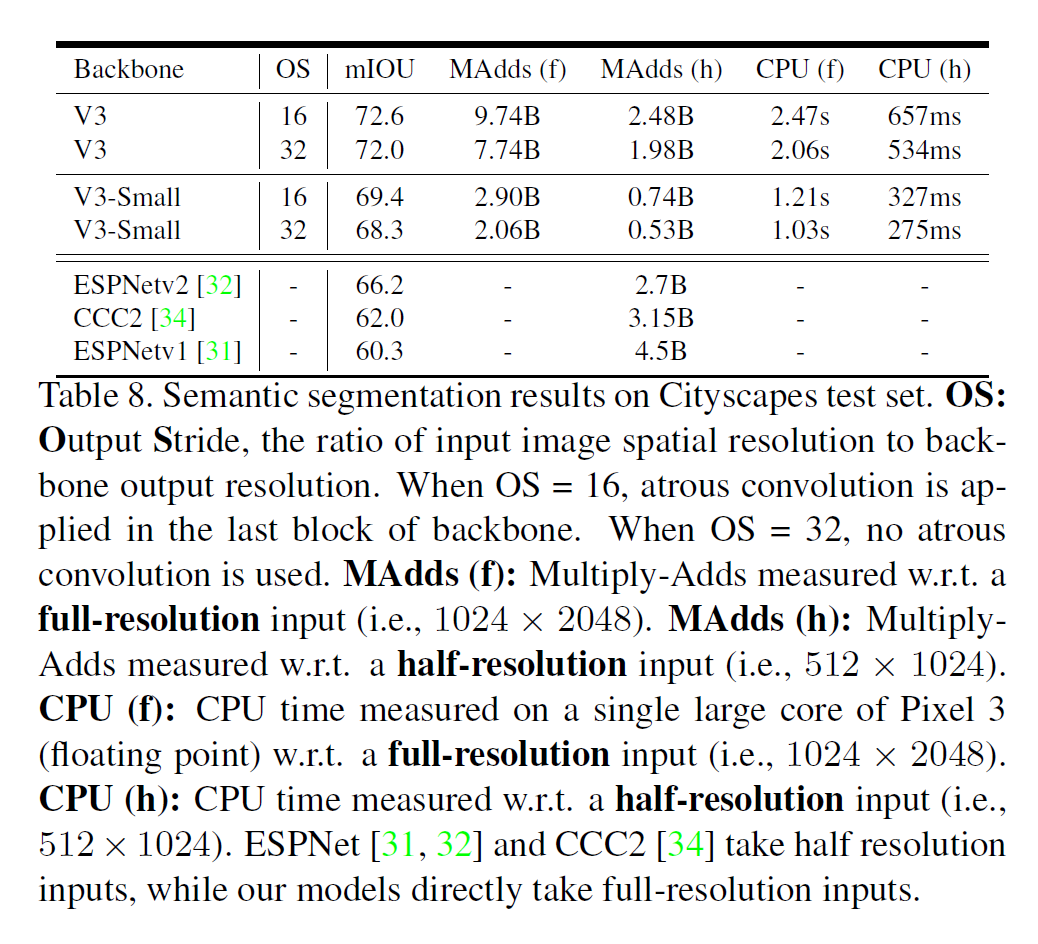
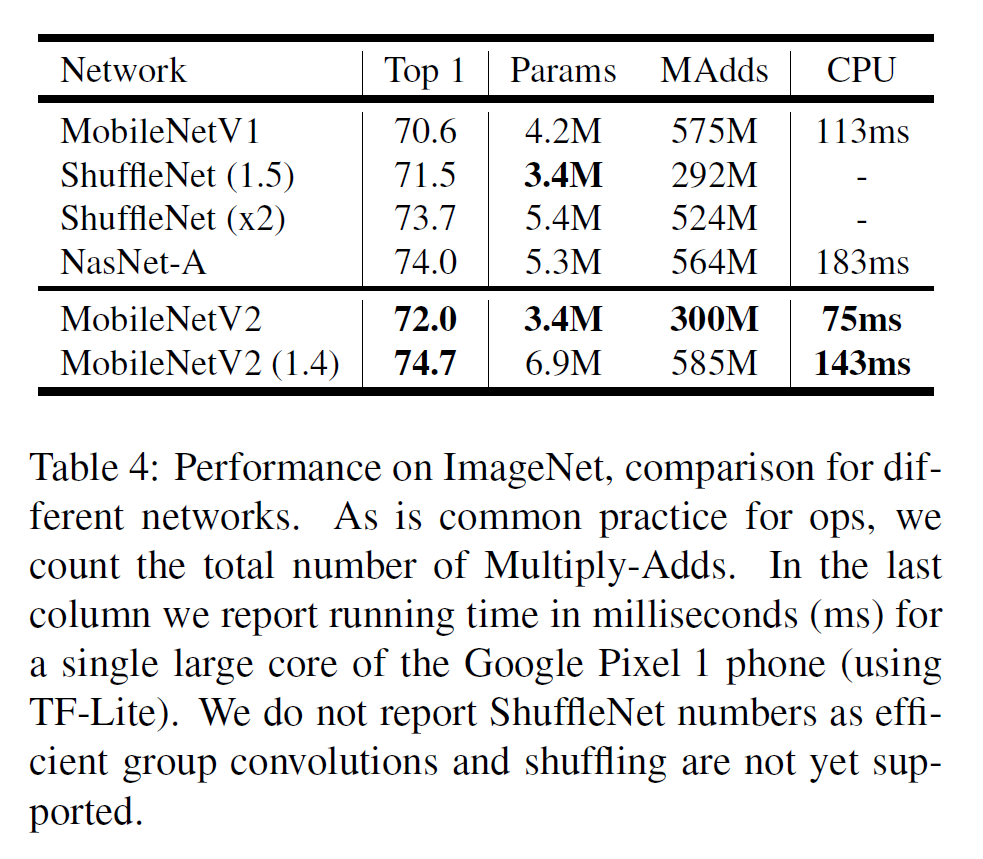
8.4배 적은 연산량으로 더 높은 정확도를 갖는다는 것은 꽤 고무적이다. 결과에 따라서 18배 적거나, 아니면 5.7배, 6.1배 더 빠른 추론 시간을 보여주기도 한다. (표 1, 5 등)
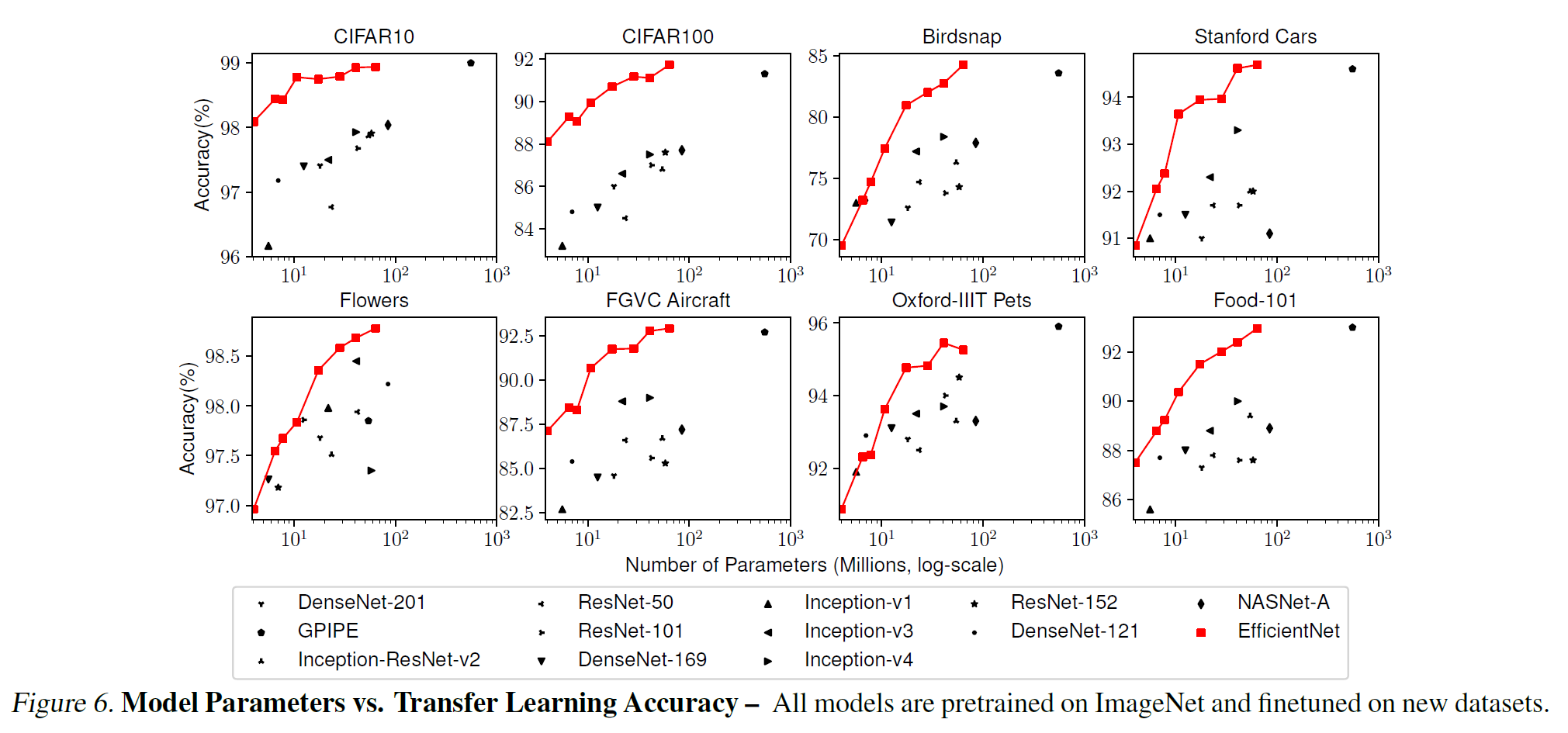
5.3. Transfer Learning Results for EfficientNet
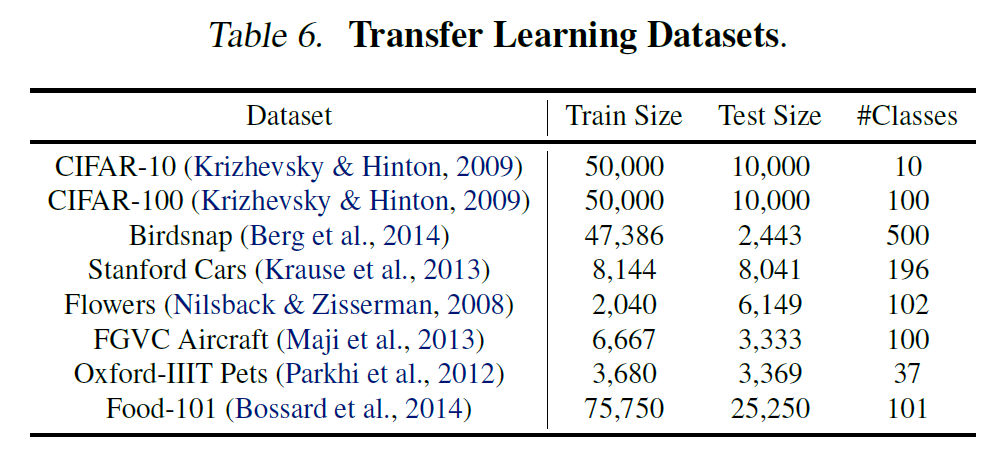
전이학습 dataset에 대한 결과를 기록해 놓았다.
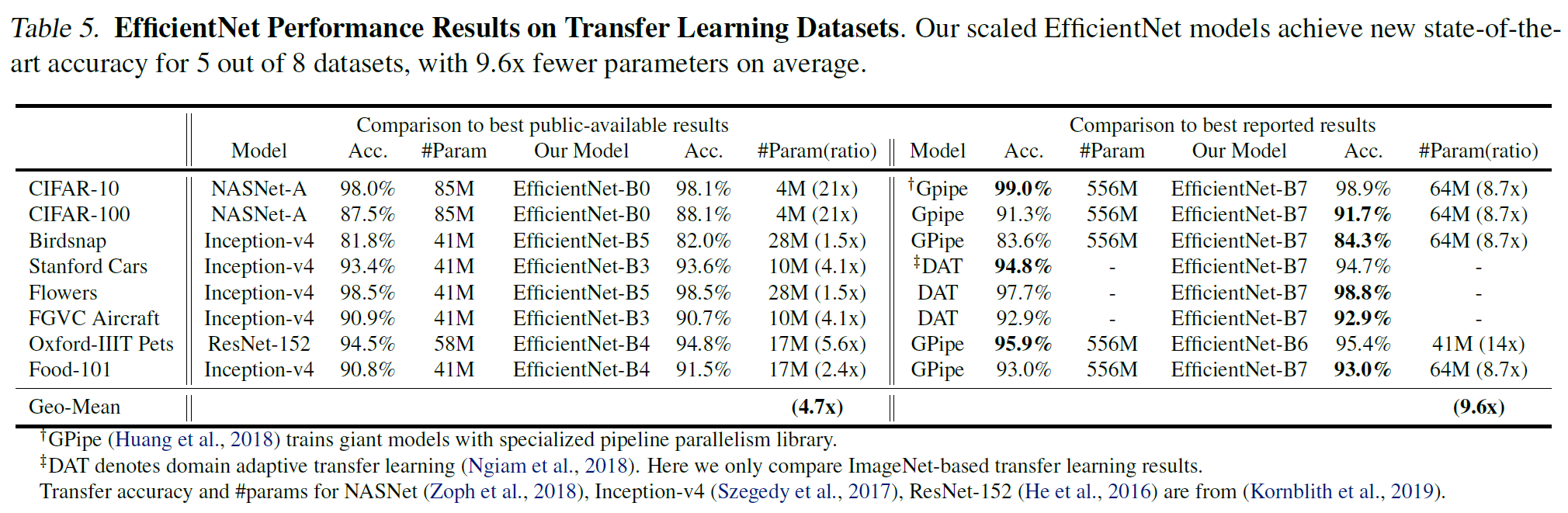
여기도 비슷하게 몇 배 더 작고 적은 연산량으로 더 좋은 정확도를 갖는다는 내용이다.
데이터셋에 대한 정보이다.
baseline 모델에 대해서 어떻게 scaling을 할지를 테스트해 보았다. 표 3과 같은 결과를 보여준다.
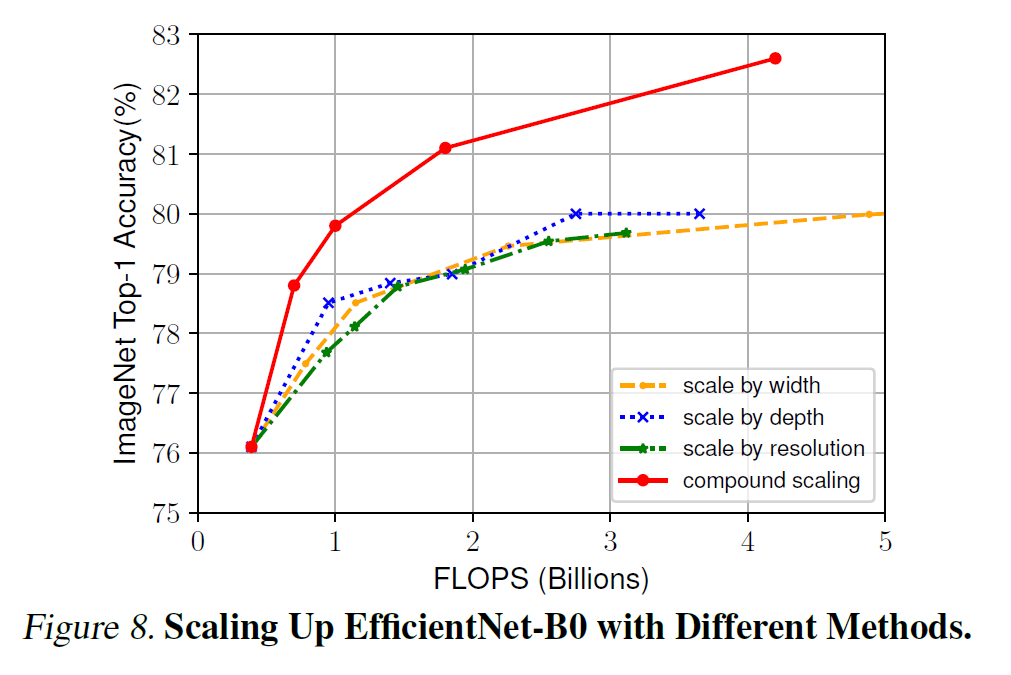
6. Discussion
어떻게 scaling을 해야 하는지 아래 그림이 단적으로 보여준다. depth, width, resolution은 서로 긴밀히 연관되어 있으며 이들을 같이 키우는 것이 자원을 더 효율적으로 쓰는 방법이다.
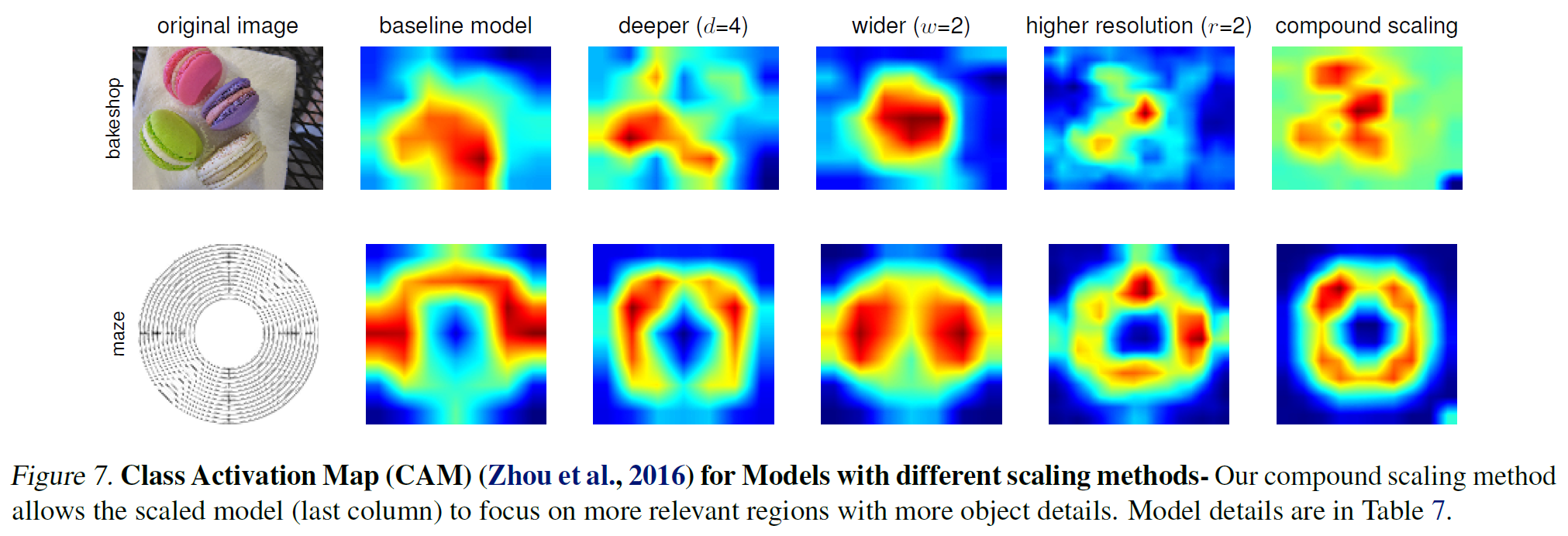
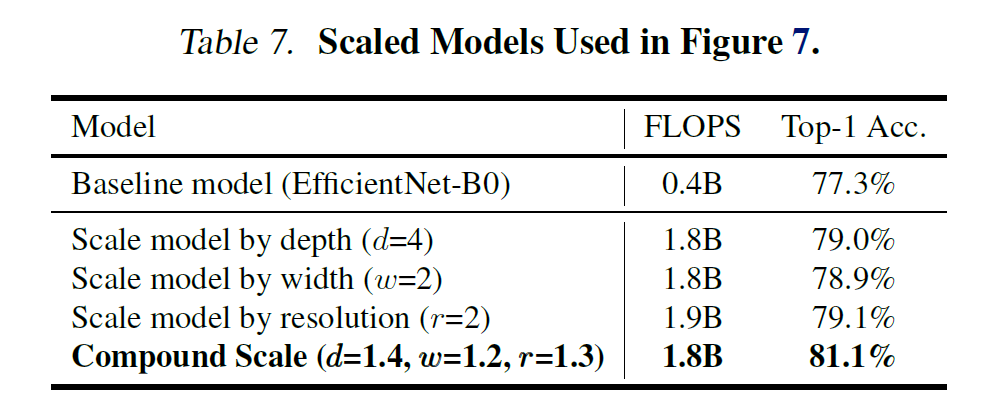
어쨰서 compound scaling method라 다른 방법에 비해 더 좋은지를 나타내는 그림이 아래에 있다. 이미지의 어디에 집중하고 있는지를 보여준다. (근데 attention을 딱히 적용하진 않았다.)
7. Conclusion
한정된 자원을 갖고 있는 상황에서 Depth, Width, Resolution을 어떻게 적절히 조절하여 모델의 크기와 연산량을 줄이면서도 성능은 높일 수 있는지에 대한 연구를 훌륭하게 수행하였다.